Features:
- Fully modular
- 50+ base variables and parameters to fine tune your walker
- AI nav mesh and player controller controllable
- 31 base models to choose
- 23 rigged legs to use right away
- 3 Obstacle maps to test run your walkers
- 3 Behavior tree examples for navigation
- Audio integration with footstep
- Attach any leg to any body without complex coding
- Usable and integratable with your existing characters and meshes
Supported Development Platforms:
Windows: Yes
Discord: discord.gg/zdX9PCt
特征:
- 完全模块化
- 50+基本变量和参数来微调你的步行者
- AI导航网格和玩家控制器可控
- 31种基本型号可供选择
- 23条索具腿立即使用
- 3个障碍地图来测试你的步行者
- 3导航的行为树示例
- 音频集成与脚步
- 将任何腿连接到任何身体,无需复杂的编码
- 可与您现有的字符和网格一起使用和集成
支持的开发平台:
Windows:是的
不和谐: discord.gg/zdX9PCt


Trailer: youtube.com/watch?v=ZfKkupdkxgc
Climbing Disjoint Nav: youtube.com/watch?v=GpOOYLN0GHQ
Discord: discord.gg/zdX9PCt
Demo: googledrive
Showcase video: youtube
Showcase video 2: youtube
Create AAA quality procedural animations.
Save over 100+ hours of coding and testing. Unified Procedural Legs is the ultimate framework for building fully modular, procedurally animated leg, foot alignment, and body movement for characters.
Full implemented in BP, with over 50 base variables to modify, this frame work allows you to attach any of your own rigged leg mesh to any body, and have it be procedurally animated with walking motion right away.
Handles both leg motion, foot alignment to surface, as well as body motion and rotation based on terrain positioning. It has full debug traces for users to visualize interactions with the terrain.
Contains over 40 models and legs as a starter kit to rapidly build and prototype your characters, as well as 3 obstacle maps to test your characters movement.
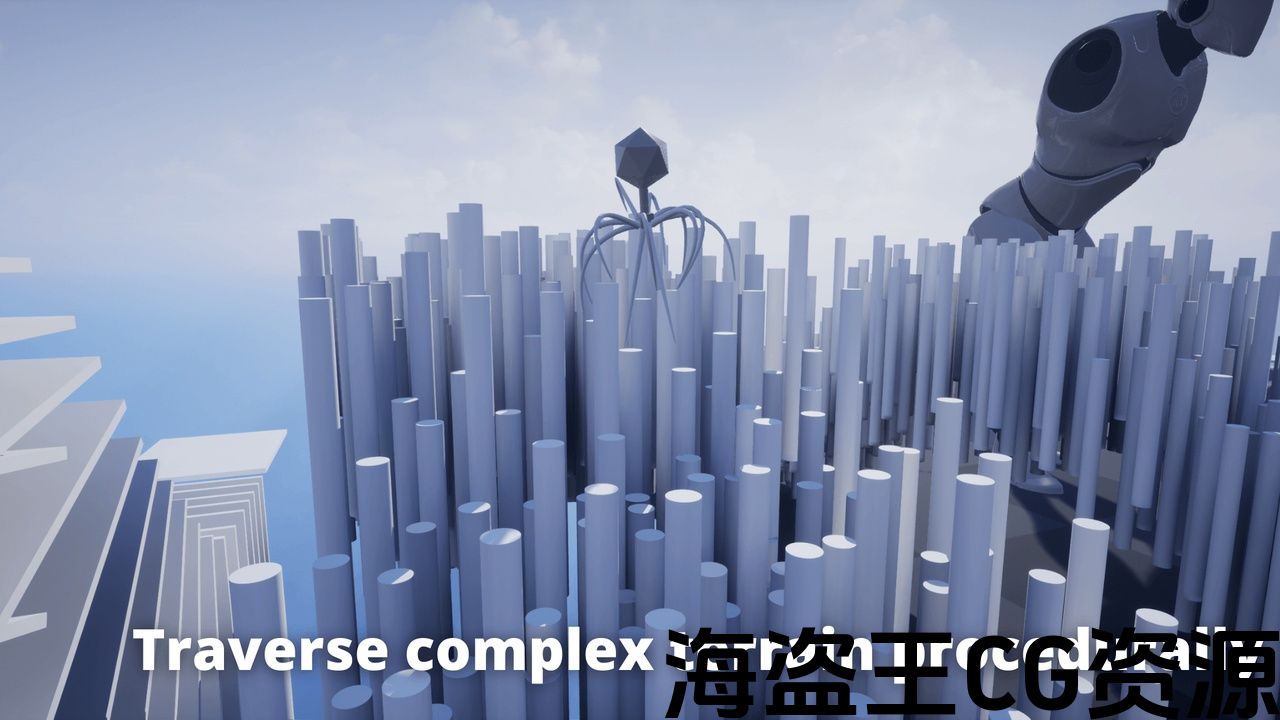
This framework allows for traversal even on disjoint nav meshes and floating platforms, allowing for procedural climbing and descending.
拖车/拖车: youtube.com/watch?v=ZfKkupdkxgc
攀登不相交的导航: youtube.com/watch?v=GpOOYLN0GHQ
不和谐: discord.gg/zdX9PCt
示范: 谷歌驱动器
展览短片: youtube的
展览短片2: youtube的
创建AAA质量的过程动画.
节省超过100小时的编码和测试. 统一的程序腿是为角色构建完全模块化、程序动画的腿、脚对齐和身体运动的最终框架。
完全在BP中实现,有超过50个基本变量要修改,这个框架工作允许您将任何您自己的操纵腿网格附加到任何身体,并有它的程序动画与步行运动马上。
处理腿部运动,脚部与地面的对齐,以及身体运动和旋转基于地形定位。 它具有完整的调试跟踪,供用户可视化与地形的交互。
包含超过40个模型和腿作为一个初学者工具包,以快速建立和原型您的角色,以及3个障碍地图测试您的角色运动。
该框架允许在不相交的导航网格和浮动平台上进行遍历,允许程序性爬升和下降。
评论(0)