功能:
-
使用加权 A* 寻路算法。
-
寻路在异步线程上完成。
-
与 Unreal 的导航网格配合使用以实现动态寻路。
-
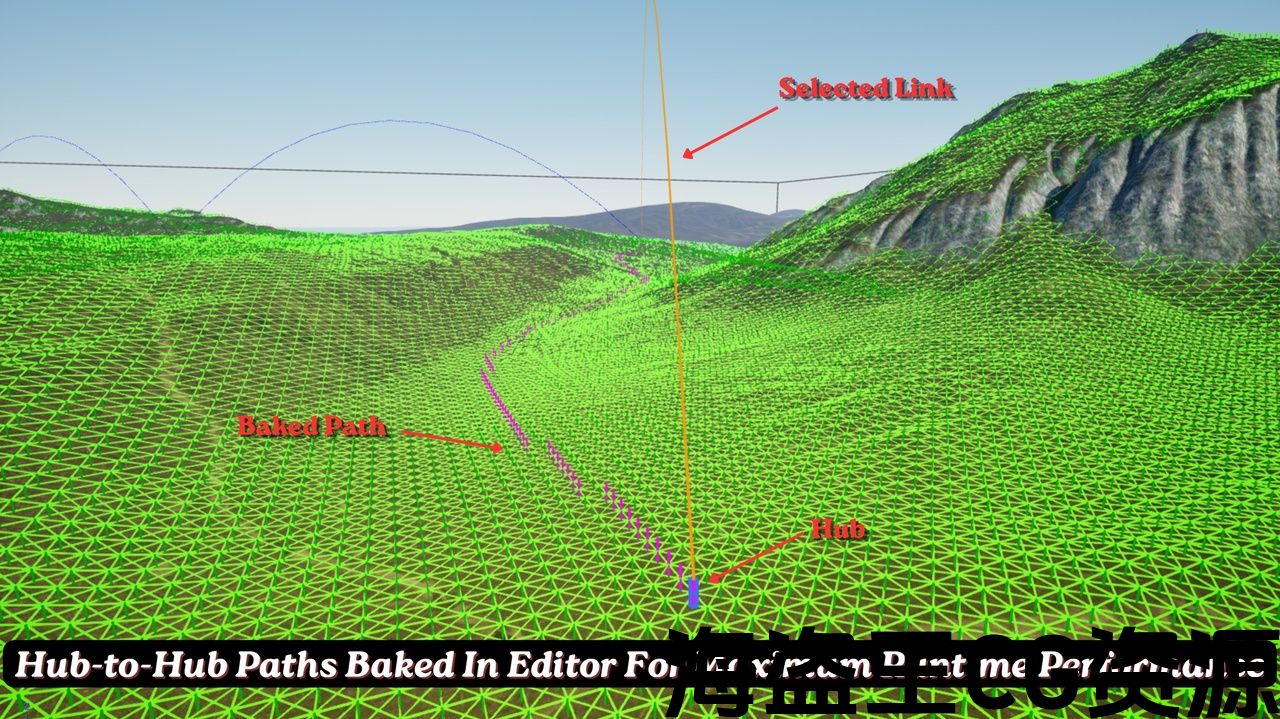
在编辑器中缓存从另一个 Hub 通向 Hub 的路径以获得最大的运行时性能
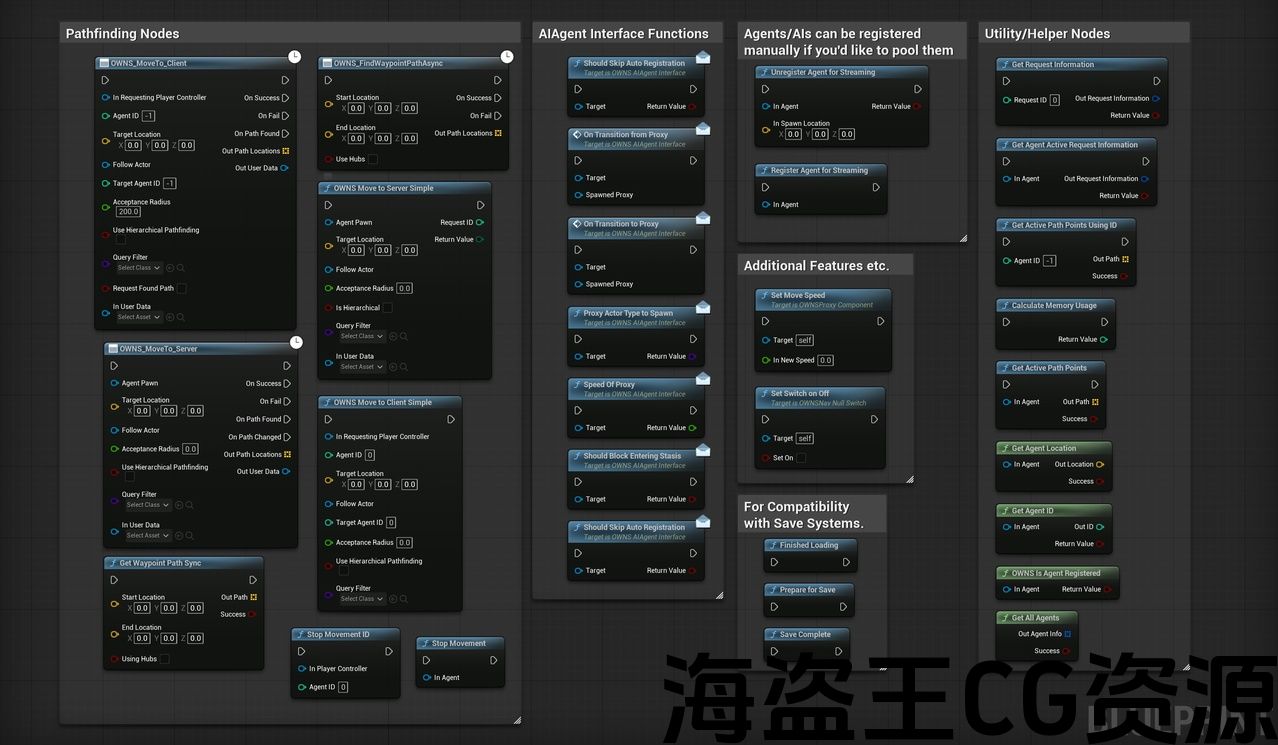
代码模块:
OpenWorldNavigationSolution:包括将在运行时使用的流系统和导航系统。
OpenWorldNavigationSolutionEditor:用于在地图上放置航点,创建航点网格并烘焙路径
要求:
-
WorldPartition
-
StateTree
-
GameplayStateTree
-
ProceduralMeshComponent
蓝图数量: 1
C++ 类数量:32
网络复制:是
支持的目标构建平台:Win64
支持的开发平台:Windows
备注:
在开发插件时,我的目标是一张 16x16km 大小的地图,最多有 200 个代理。平坦的 16x16km 景观航路点内存使用量约为 350 MB。
功能:
-
在 16×16 公里的风景上使用 200 个并发代理进行持续的开放世界寻路。
-
自定义流系统不会破坏您的代理,而是将它们置于静止(睡眠)状态,同时最大限度地提高性能启用即时流输入和输出。
-
持久寻路意味着代理在流出时将继续尝试到达目标目的地。
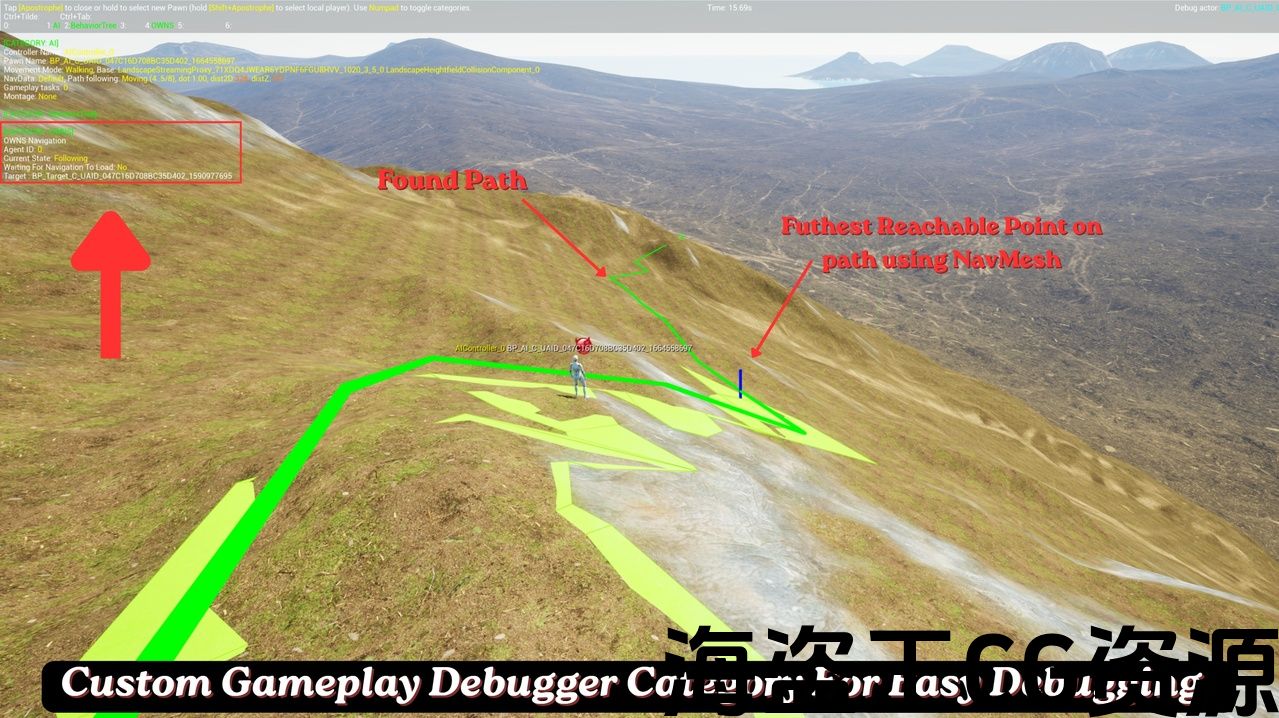
-
自定义游戏调试器,方便调试。
-
在编辑器中预先计算将集线器彼此链接的路径。
-
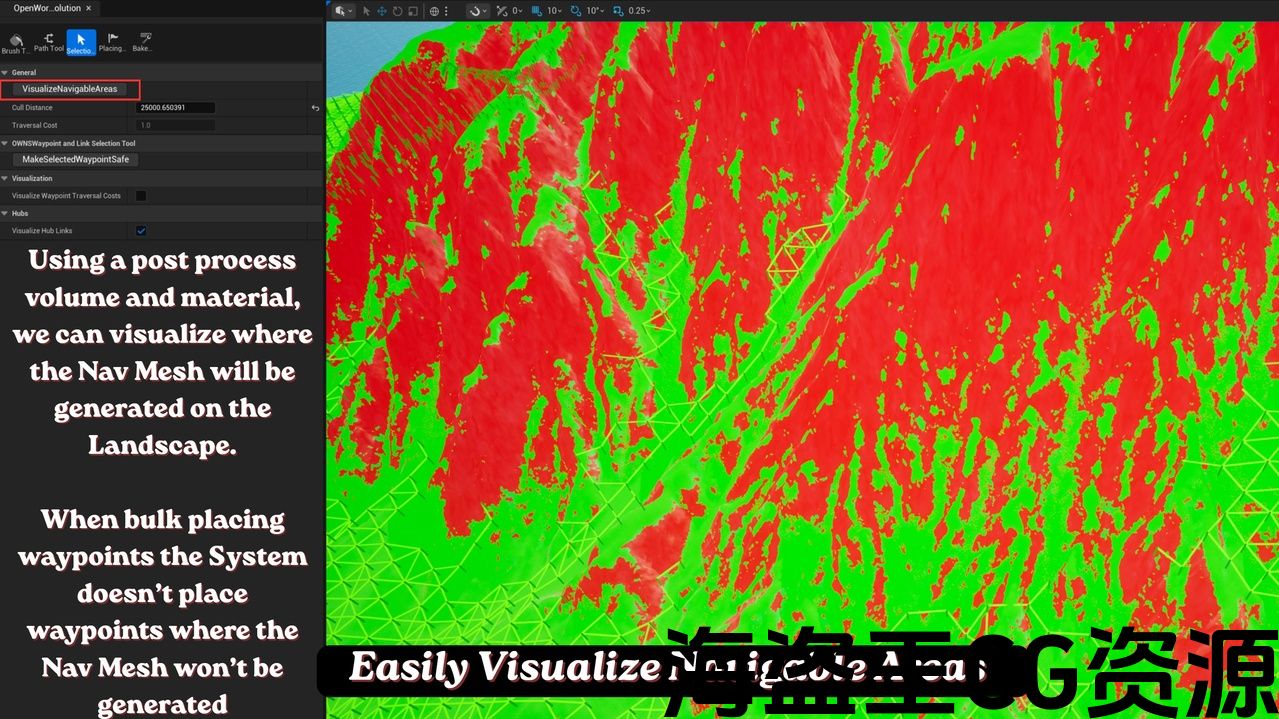
使用后期处理体积,用户可以直观地看到导航网格的位置将在编辑器中生成。
-
当代理处于静止状态时取代代理的可编程代理。
-
经过测试并与 EMS – Easy Multi Save 兼容。
-
不同的工具可以轻松在巨大的地图上放置路径点。
-
支持复制。
-
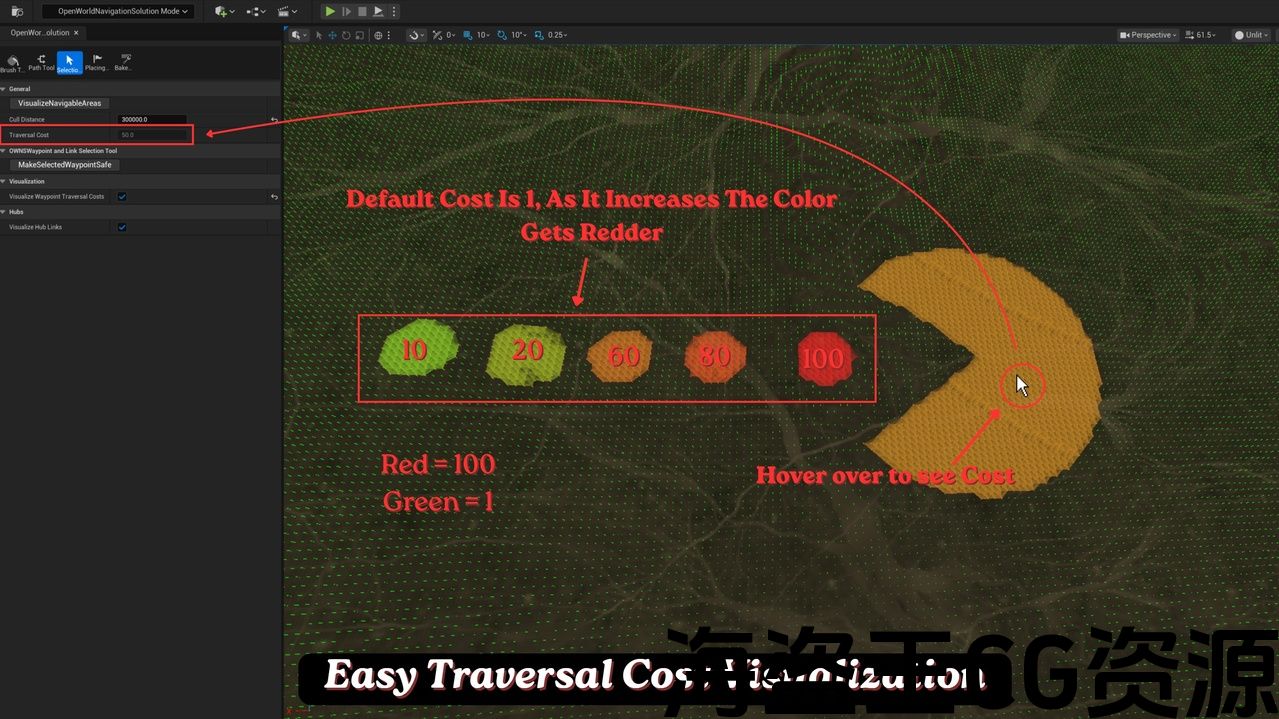
可调节的 A* 寻路启发式权重。
代码模块:
-
OpenWorldNavigationSolution:包括将在运行时使用的流系统和导航系统。
-
OpenWorldNavigationSolutionEditor:用于放置地图上的航点,为运行时创建航点网格和烘焙路径。
要求:
这些插件都包含在 Unreal 中引擎。
-
WorldPartition
-
StateTree
-
GameplayStateTree
-
ProceduralMeshComponent
网络复制:是
支持的目标构建平台:Win64
附加说明:
在开发插件时,我的目标是一张16×16公里大小的地图,最多有200个特工。平坦的 16×16 公里风景路径点内存使用量约为 350 MB。
并非所有 AI 都应该是代理,只有您希望在整个地图上持续存在并四处移动的高调 AI 才应该是自己的代理。
评论(0)