Features:
- There are no camera jerks with any target rotations (this issue of the Spring Arm is demonstrated here)
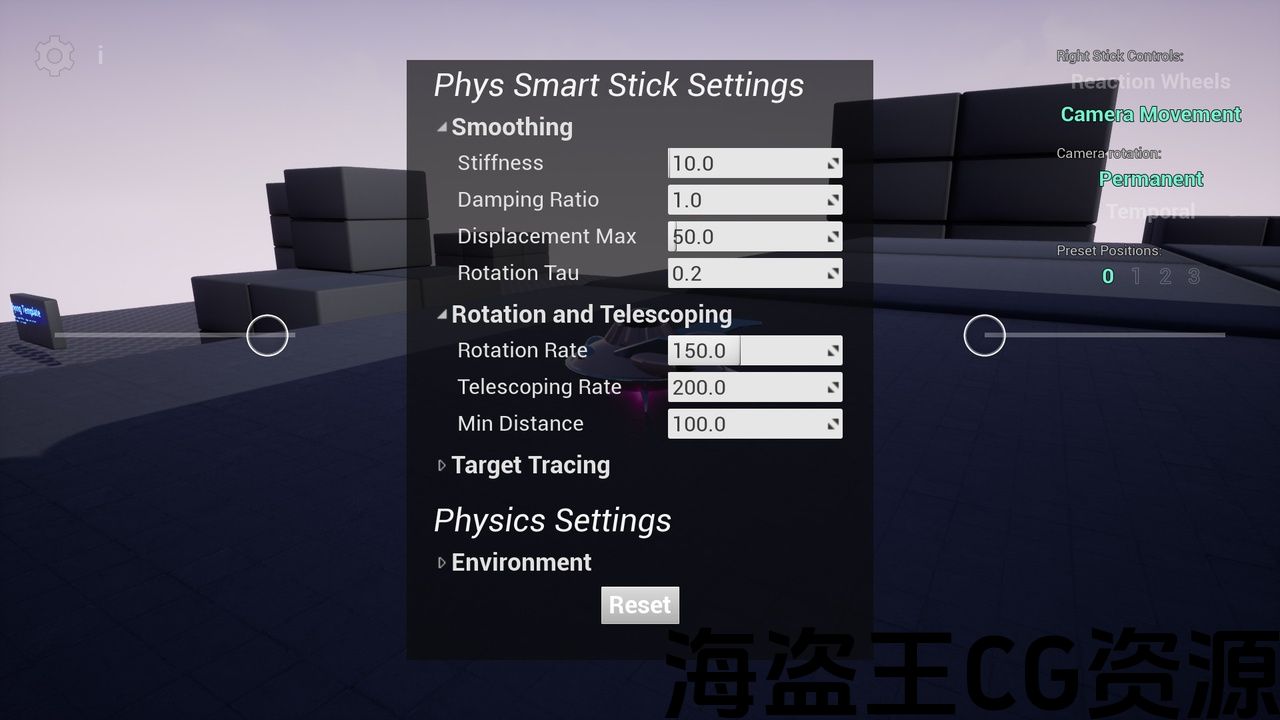
- With trace enabled checking whether the view of the target is obscured, camera will move with adjustable rate along the trace line
- The time interval of this trace can be set, allowing to avoid tracing in every frame
- Camera "attached" to the smart stick will always look at the specified target regardless of acceleration of the target
- Positions of the smart stick can be saved during a game, and then the camera can move smoothly between saved positions
This submission also comprises C++ source code of the UCameraSmartStickGeometric and UCameraSmartStickPhysical classes (here are their header files).
Main Blueprints:
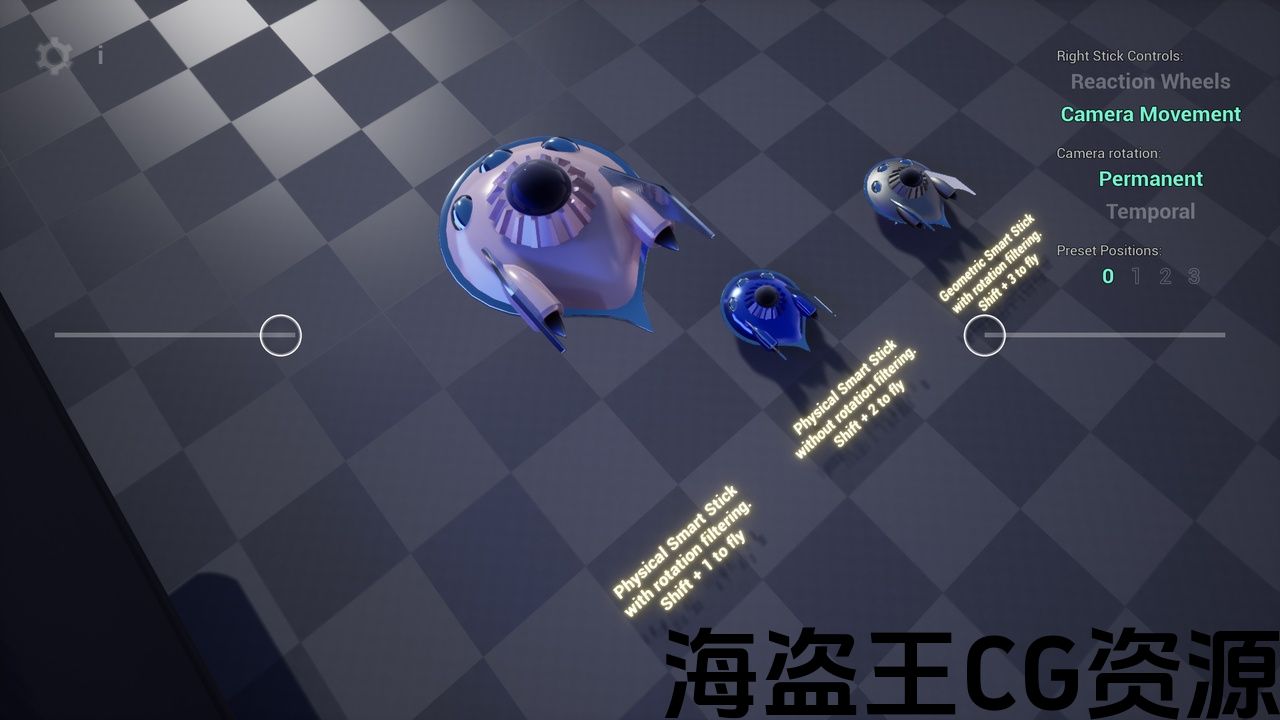
- CameraSmartStick and CameraSmartStick_phys – the geometric and physical smart stick, respectively
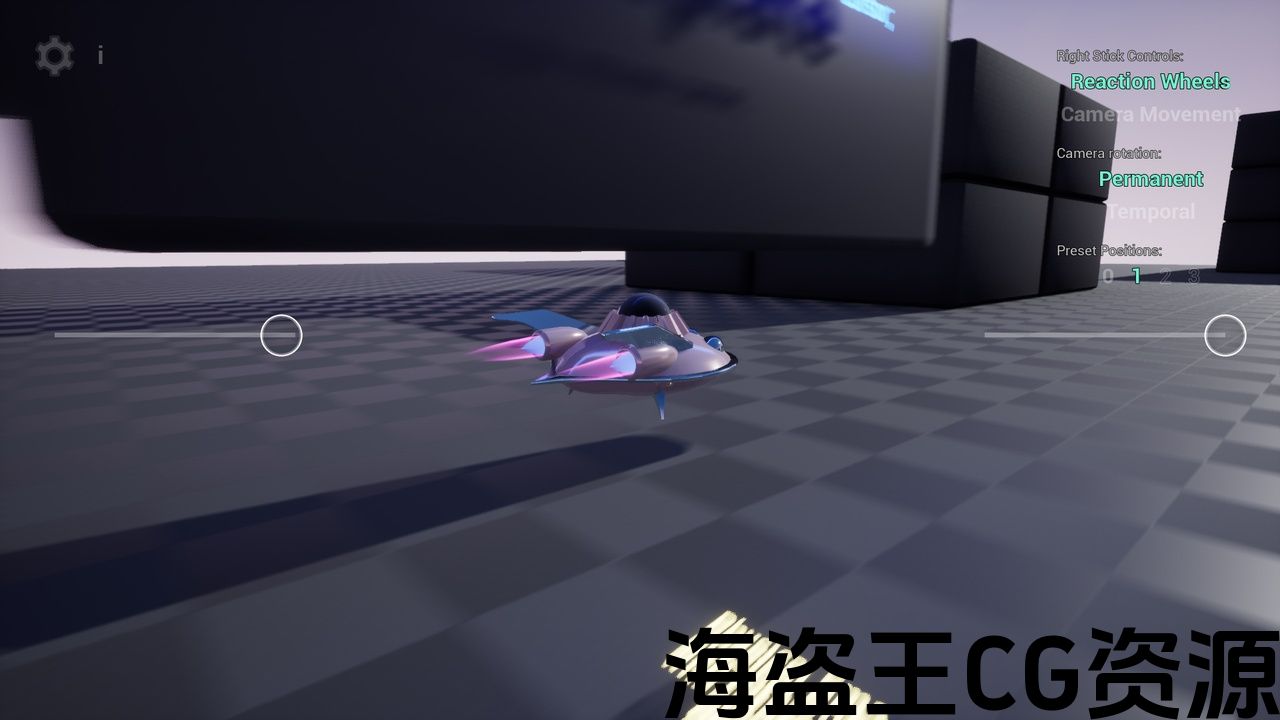
- FlyingSaucer – a pawn representing the spaceship used in the demonstration video
Network Replicated: No
Input: Gamepad, Keyboard, Mouse
特征:
- 没有任何目标旋转的相机抖动(这个问题的 弹簧臂 被证明 这里)
- 启用跟踪检查目标的视图是否被遮挡后,相机将沿着跟踪线以可调节的速率移动
- 可以设置此跟踪的时间间隔,从而避免在每个帧中跟踪
- “连接”到智能棒上的相机将始终看着指定的目标,而不管目标的加速度如何
- 在游戏过程中可以保存智能棒的位置,然后相机可以在保存的位置之间平稳移动
此提交文件还包括 UCameraSmartStickGeometric碌录潞陆 和 N.物理,物理 类(这里是他们的头文件).
主要蓝图:
- N.照相机,照相机 和 摄像师/摄像师 – 分别是几何和物理智能棒
- 飞鸟,飞鸟 – 一卒 代表演示视频中使用的宇宙飞船
网络复制:没有
输入:游戏手柄,键盘,鼠标


Camera Smart Stick is an actor component that controls camera movements and ensures their smoothness during various actor movements. Being the analogue of the Spring Arm component, Camera Smart Stick has essential differences in its working principle allowing to eliminate some of the shortcomings of the Spring Arm.
This project includes two types of smart sticks using two different models of camera movements – geometric and physical. The geometric model is simpler and more stable than the physical one, but the latter gives more natural camera movements and uses the damping ratio parameter to control oscillatory behavior of camera movements.
Although the both smart sticks can be used with non-physical actors most of the advantages of the smart sticks can be seen when used with physical actors moving with smooth changes in speed (in contrast, non-physical actors can have instantaneous changes in speed which is equivalent to infinitely large accelerations which are problematic for the physical smart stick because they may cause numerical errors and instability).
相机智能棒 是一个actor组件,用于控制摄像机移动并确保其在各种actor移动期间的平滑度。 与 弹簧臂 组件, 相机智能棒 在其工作原理上有本质的差异,可以消除 弹簧臂.
该项目包括两种类型的智能棒,使用两种不同的相机运动模型-几何和物理。 几何模型比物理模型更简单,更稳定,但后者提供了更自然的相机运动,并使用 阻尼比 控制摄像机运动的振荡行为的参数.
虽然这两个智能棒都可以与非物理actor一起使用,但当与速度平滑变化的物理actor一起使用时,可以看到智能棒的大部分优点(相比之下,非物理actor可以具有速度的瞬时变化,这相当于无限大的加速度,这对于物理智能棒来说是有问题的,因为它们可能导致数值错误和不稳定)。
评论(0)