Loading Robot:
2K and 4K Textures. (2K with 3 Material IDs) Change your own Color.
39390 tries.
Own created Collision Mesh. (exact at the Pliers).
No Problem with Scaling.
Programmable Robot:
2K and 4K Textures.
5 4K Materials and Instances
19000 Tries.
Own created Collision Mesh (exact at Fork and Pliers).
Pliers:
4768 Tries, Animated w. Armature: Open/Close.
no Problem with scaling
Fork:
10888 Tries
Static, no Armature
装载机器人:
2k和4k纹理。 (2k与3个材料Id)改变自己的颜色。
39390试试。
自己创建的碰撞网格。 (精确的钳子)。
缩放没有问题。
可编程机器人:
2k和4k纹理。
5 4K材料和实例
19000尝试。
自己创建的碰撞网格(精确在叉子和钳子).
钳子,钳子:
4768尝试,动画w.电枢:打开/关闭.
缩放没问题
叉子,叉子:
10888尝试
静态,无电枢

Includes two robots.
The Loading Robot is controlled by Hand. 6 Axis available. Needs Pulse Input, like Buttons. The Pliers moving with physics constraint power.
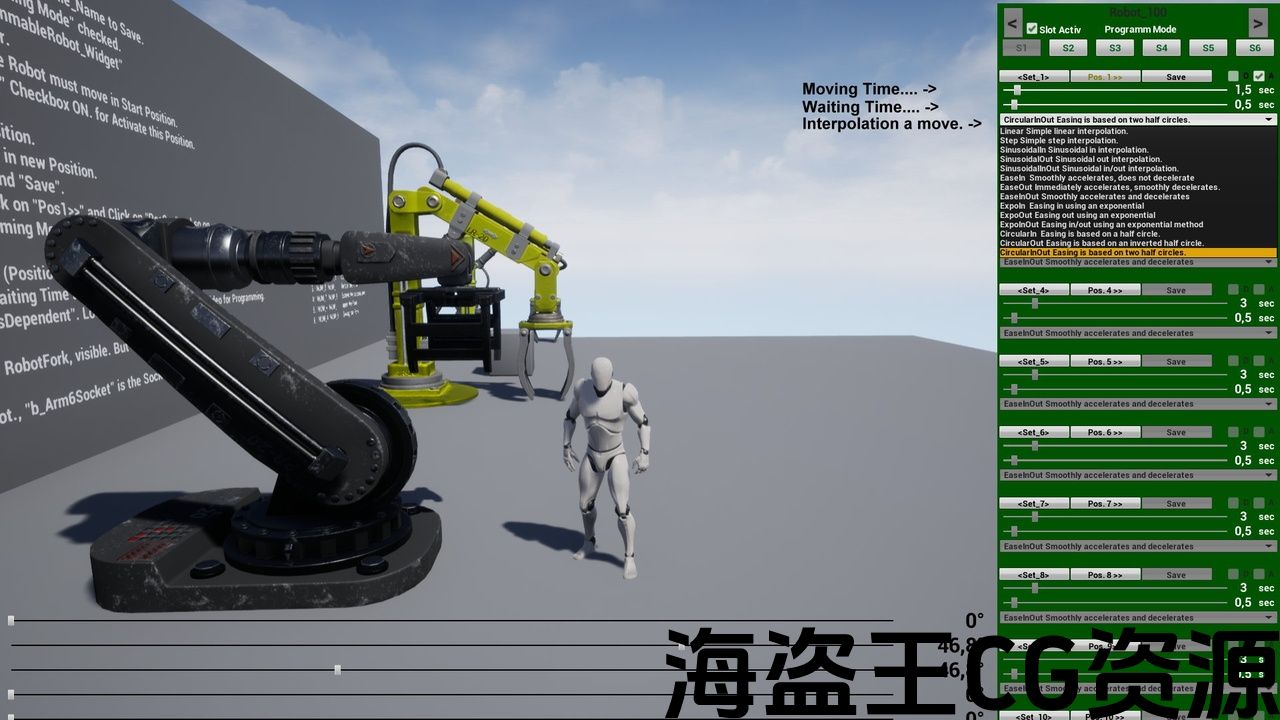
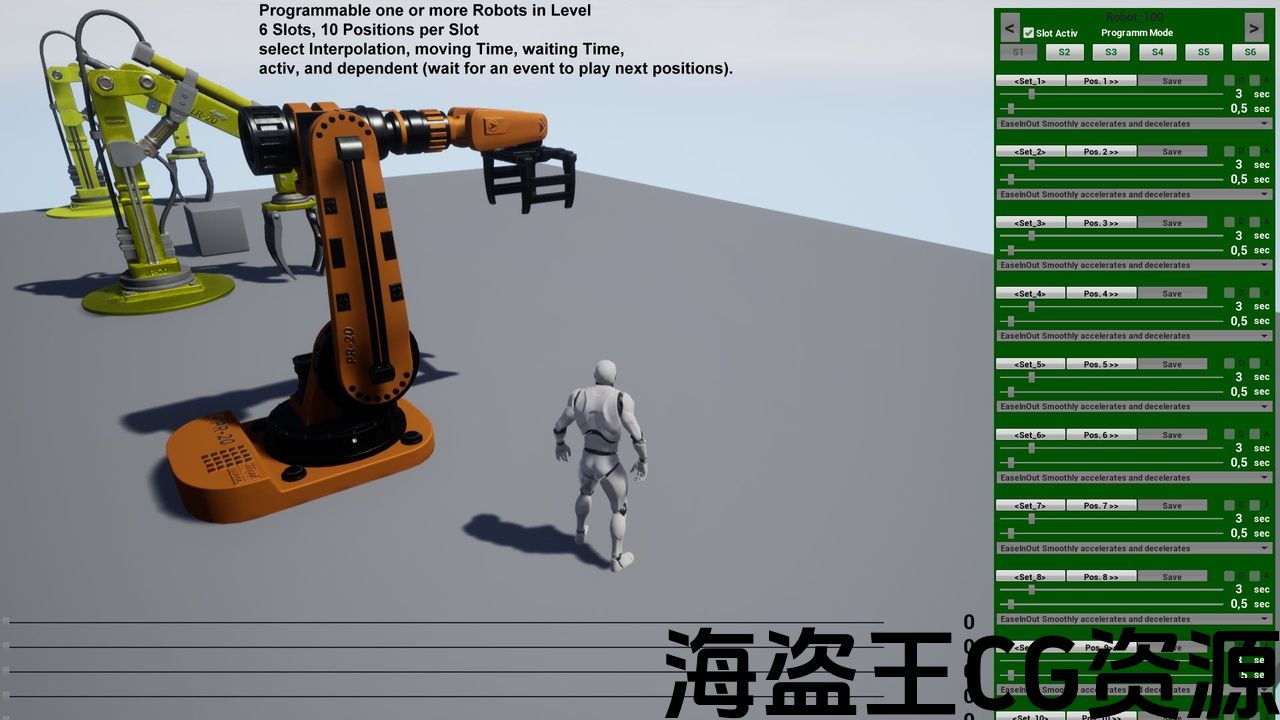
The Programmable Robot controlled by specific Positions.
With the ProgrammRobot Widget you can set 6 Slot with 10 Positions each.
This Robot make a SaveGame Object in your Project for saving the Positions.
You can use more Robots with same Name, but they do the same.
Each robot generates its own save game.
The positions, times, interpolation mode, some checkbox are saved in the memory file.
The storage is based on the name of the robot.
(At the beginning the robot checks whether a memory file is available, otherwise a new one is created).
Videos:
HowTo config the Programmable Robot
Programmable Robot Include features:
Multiple ways to interpolate motion.
Movement time adjustable
Adjustable waiting time after movement.
Dependency on the start of the movement (external event).
Hydraulic-Sound.
Pliers and Fork. You can use what you want at the Socket.
包括两个机器人。
装载机器人 是用手控制的。 6轴可用。 需要脉冲输入,如按钮。 钳子用物理约束力移动.
可编程机器人 特定位置控制。
使用ProgrammRobot小部件,您可以设置6个插槽,每个插槽10个位置。
这个机器人在你的项目中做一个SaveGame对象来保存位置.
您可以使用更多同名机器人,但它们也是如此。
每个机器人都会生成自己的保存游戏。
位置,时间,插值模式,一些复选框保存在内存文件中。
存储基于机器人的名称。
(在开始时,机器人会检查内存文件是否可用,否则会创建一个新文件)。
短片:
可编程机器人包括功能:
运动进行插值的多种方式。
运动时间可调
运动后的可调整等待时间。
动开始的依赖性(外部事件)。
液压声。
钳子和叉子。 你可以在插座上使用你想要的东西。
评论(0)