Code Modules:
-
HTN [Runtime]
-
HTNEditor [Editor]
Number of Blueprints: 0
Number of C++ Classes: 70
Network Replicated: No (not needed for AI)
Supported Development Platforms: Windows
Supported Target Build Platforms: Windows 64-bit, macOS, Linux, Android, iOS, PS4, PS5, Xbox One, Xbox Series X, Xbox Series S, Nintendo Switch
Documentation: HTN Documentation
Example Project: HTN Example Project
代码模块:
-
HTN[运行时]
-
HTNEditor[编辑]
蓝图数目: 0
C++类数: 70
网络复制: 不(AI不需要)
支持的开发平台: 窗户
支持的目标构建平台: Windows64位,macOS,Linux,Android,iOS,PS4,PS5,Xbox One,Xbox Series X,Xbox Series S,Nintendo Switch
文件: HTN文档
示例项目: HTN示例项目
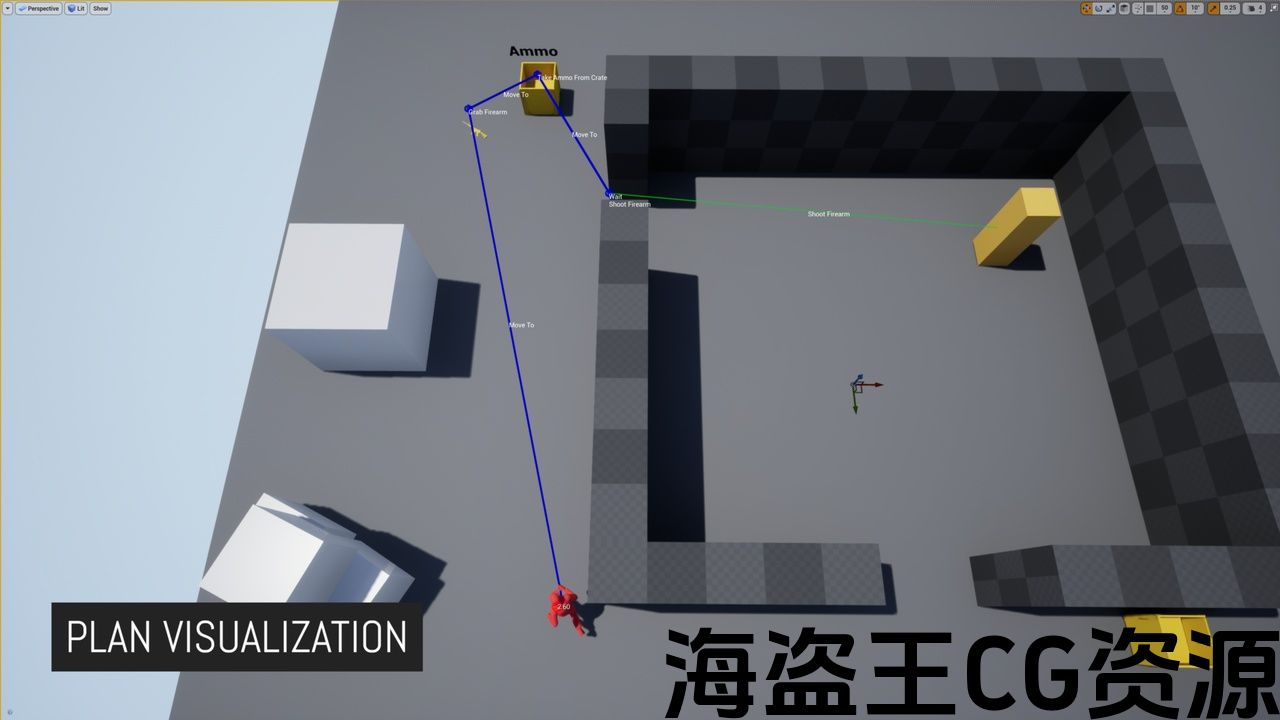

The HTN Planning plugin lets you create AI that can plan multiple steps ahead by predicting the consequences of its actions. Here are some examples:
- Video: an HTN-based character inventing the optimal plan to attack a target
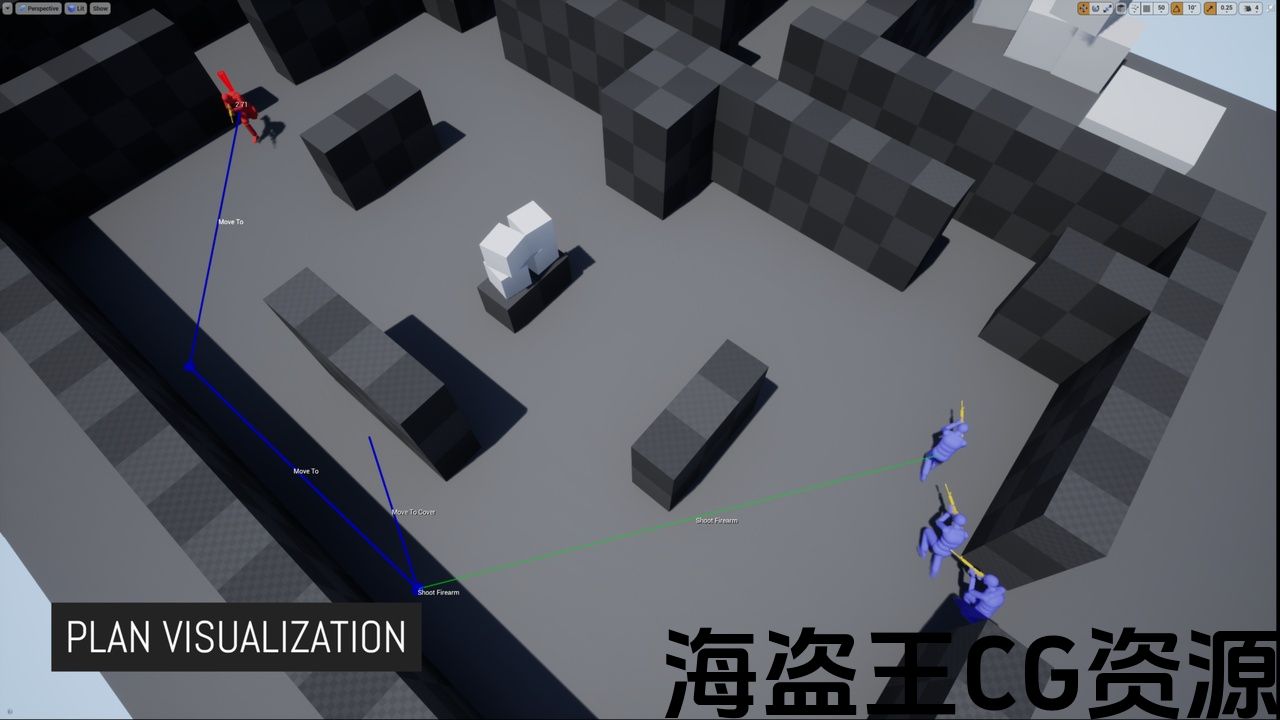
- Video: two groups of HTN-based characters tactically fighting in a simple FPS arena
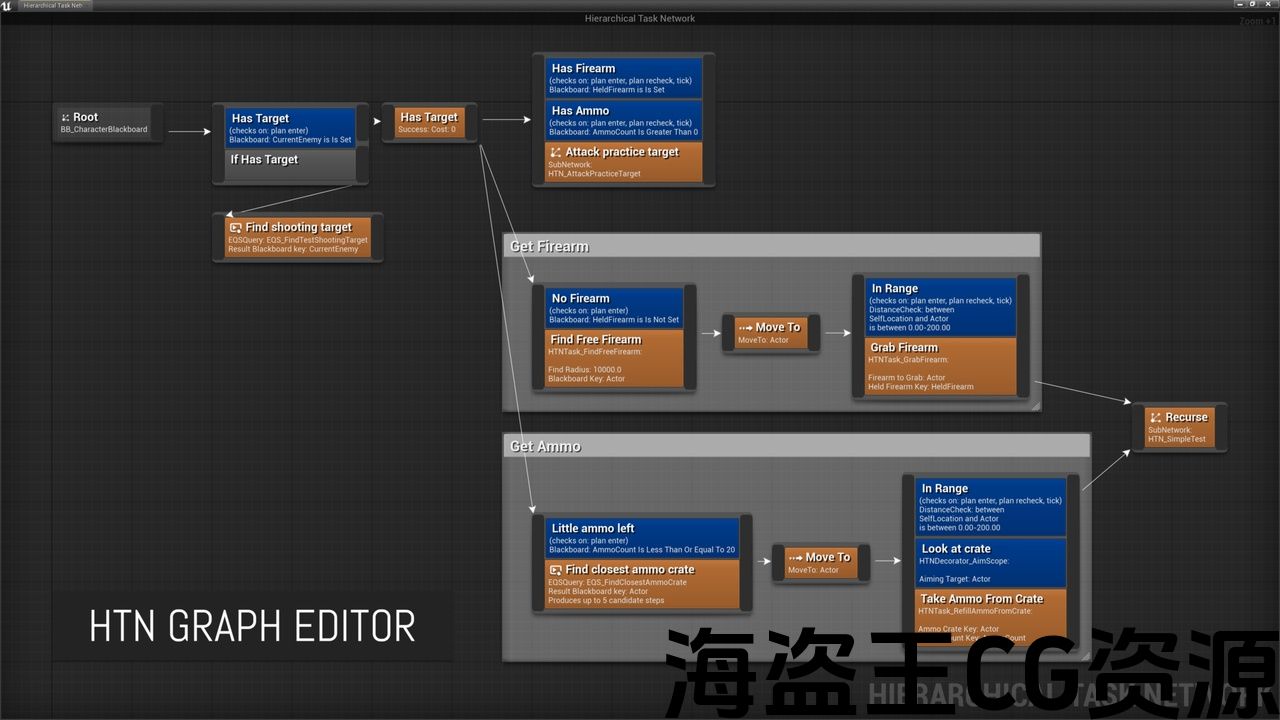
Just like with Behavior Trees, you can easily create Tasks, Decorators, and Services from either C++ or Blueprints, and arrange them in a visual graph editor. The HTN planner uses Blackboard data to store knowledge about possible future worldstates. Nodes check and modify values in the worldstate during planning, which makes it possible to make decisions based on possible future states. The planner efficiently finds the plan with the lowest cost, or the one with the highest priority.
Compared to other planning techniques like Goal-Oriented Action Planning, HTN planning is more efficient and gives designers much more control over the AI. It can be as rigid as Behavior Trees, or as flexible as GOAP. You can create AI with just as much autonomy and flexibility as you need: an AI that selects between predefined sequences of tasks, or an AI that is free to arrange its tasks in any order to achieve a goal, or anything in between.
Features:
- Node-based HTN graph editor
- Seamlessly use Blackboard data as worldstate
- Make custom Tasks, Decorators, and Services in both C++ and Blueprints
- Create composable behaviors using subnetworks
- Make subplans within plans to freely mix planning and on-the-fly decision-making
- Cost-based or priority-based planning
- Parallel planning
- Any-order planning
- Integration with the Visual Logger, including visualizing the current plan
- Integration with the Environment Query System for complex movement planning and decision-making
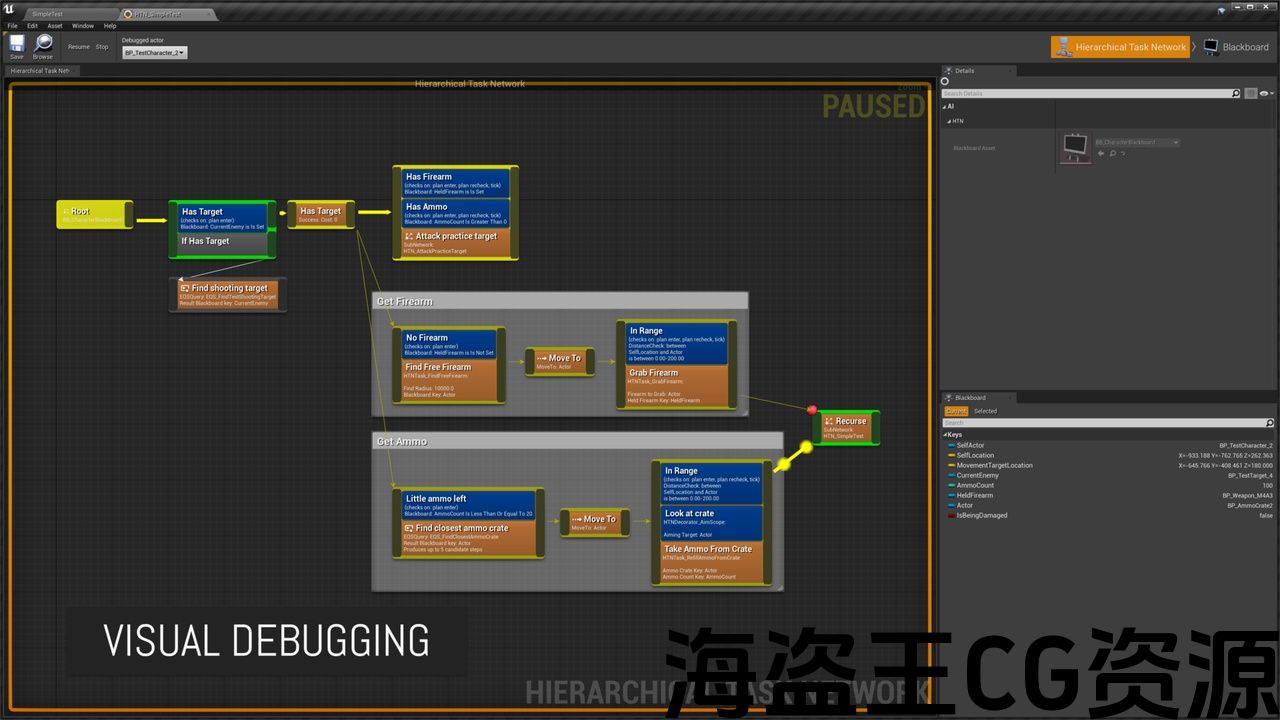
- Realtime debugging features
- Extend the HTN Component with HTN Extensions
- Full source code access
For more info, check out the documentation website, the tutorials, and the official Discord community.
HTN Planning插件允许您创建AI,通过预测其操作的后果,可以提前计划多个步骤。 以下是一些例子:
就像使用行为树一样,您可以轻松地从C++或蓝图创建任务、装饰器和服务,并将它们排列在可视化图形编辑器中。 HTN planner使用黑板数据来存储有关未来可能的worldstates的知识。 节点在规划期间检查和修改worldstate中的值,这使得可以根据可能的未来状态做出决策。 计划者有效地找到成本最低的计划或优先级最高的计划。
与其他规划技术(如目标导向的行动计划)相比,HTN规划更有效,并为设计师提供了对AI的更多控制。 它可以像行为树一样刚性,也可以像GOAP一样灵活。 您可以根据需要创建具有尽可能多自主权和灵活性的AI:在预定义的任务序列之间进行选择的AI,或者可以自由地以任何顺序安排任务以实现目标的
特征:
- 基于节点的HTN图形编辑器
- 无缝使用黑板数据作为 世界国家
- 定制 任务, 装饰师,而 服务 在C++和蓝图中
- 使用以下方法创建可组合行为 子网络
- 使 子计划 在计划中自由地混合规划和即时决策
- 以成本为基础 或 基于优先级的 规划
- 平行规划
- 任何订单计划
- 与可视化记录器集成,包括可视化当前计划
- 与环境查询系统集成 用于复杂的运动规划和决策
- 实时调试功能
- 扩展HTN组件与 HTN扩展
- 完整的源代码访问
有关更多信息,请查看 文件网站,的 指南,而官方 不和谐 社区。
评论(0)