功能:
-
包括一个骨架网格体、一个控制装置和五个用于机械臂的关键帧动画
-
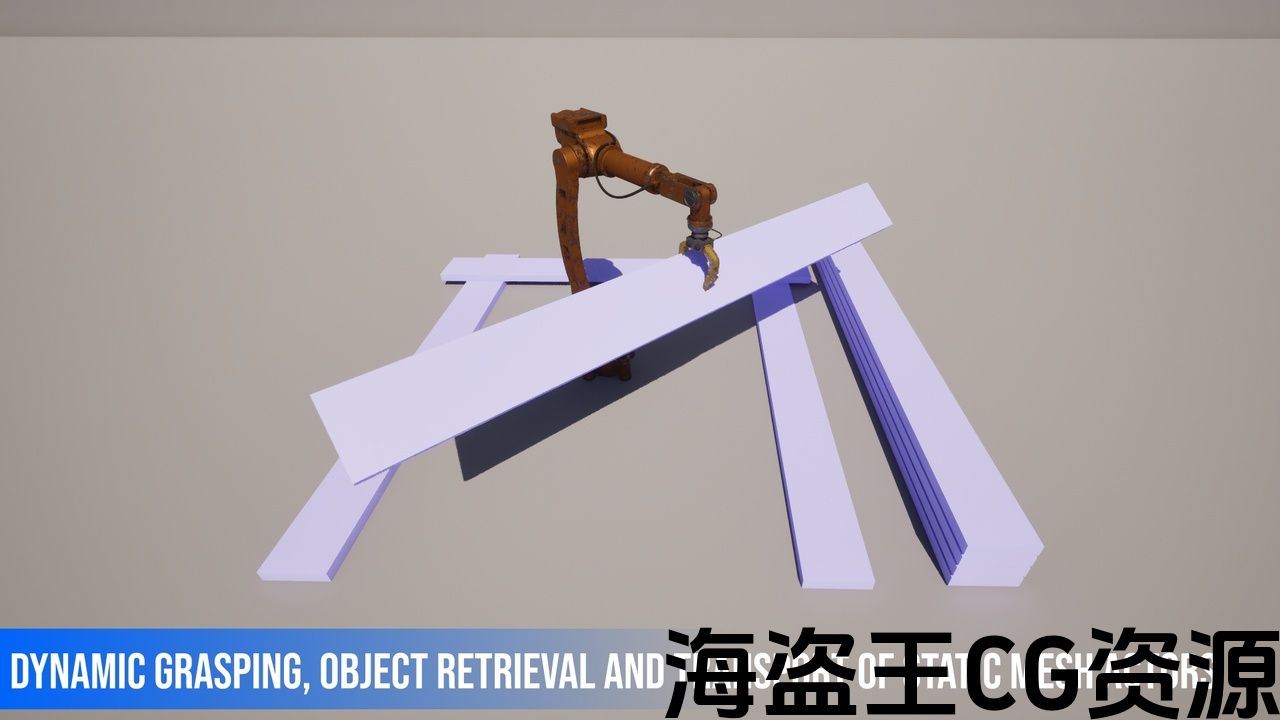
C++ 类和蓝图,用于执行静态网格体参与者的动态抓取、对象检索和传输
代码模块:AutoRoboticArm(运行时)
数量蓝图:1
C++ 类数量:1
支持的开发平台:Windows
支持的目标构建平台:Win64
文档链接:https://drive.google.com/file/d/1P_wX8yCIo7vMRT9-luxIqLYaTCTl9biN/view?usp=sharing
免责声明:此插件需要ControlRig和RigVM 引擎插件已启用。这些用于自动机械臂的核心动画和逻辑处理,并且是插件正常运行所必需的。
装备齐全的机械臂,专为多功能性而设计。它支持手动控制、传统动画以及搜索、拾取和传输静态网格物体的完全自动化。所有核心功能均通过 C++ 类实现,以实现最佳性能。
-
动态抓取、对象检索和静态网格物体传输
-
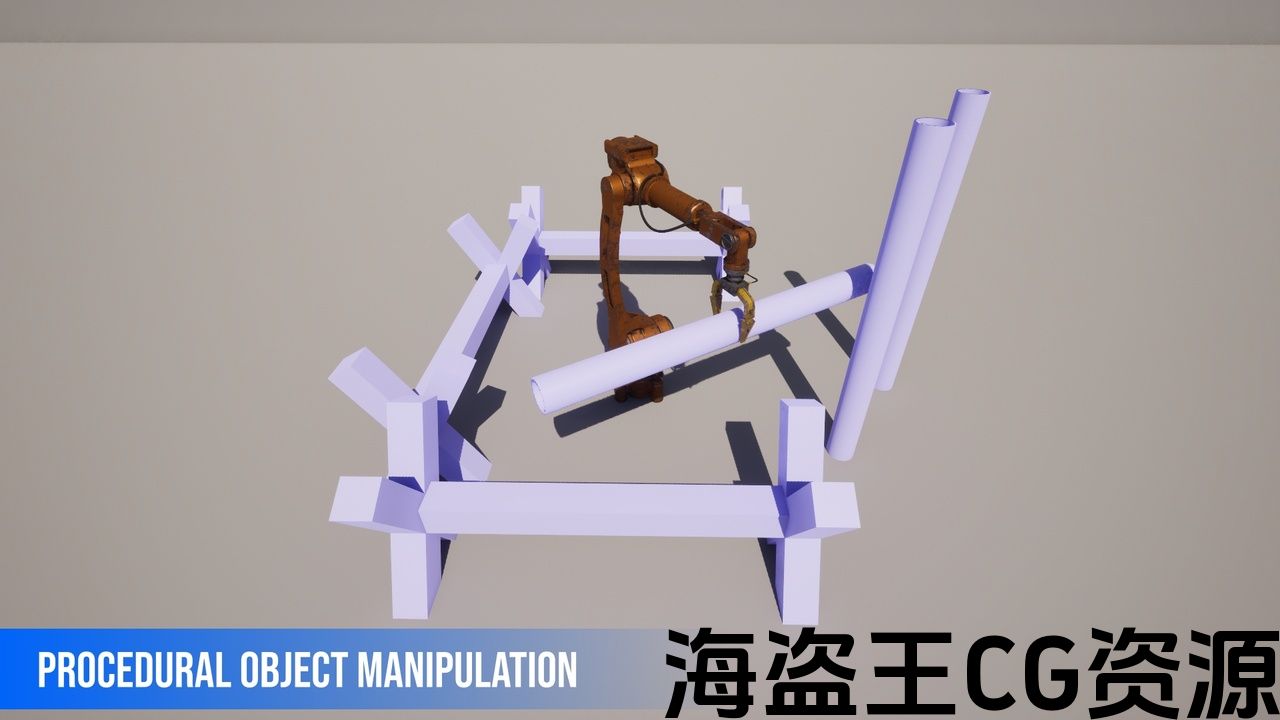
程序化对象操作
-
非常适合工厂自动化场景、装配线或高科技仓库环境。
-
将其用作实验室、空间站或空间站的功能道具。未来派维修站为场景增添活力。
-
非常适合渲染短片中的背景细节,为工业或科技含量高的镜头添加逼真的机械运动。
-
利用我们的智能工作流程消除手动动画交互的繁琐任务,该工作流程允许机械臂以程序方式计算和执行抓握实时。
手臂可在 0 和 180 偏航配置下运行。为了抓取物体,系统会追踪简单的碰撞网格来计算抓握的两个接触点。请注意,手臂是为静态网格体设计的,无法捕捉移动物体。
包含故障安全逻辑:如果手臂无法计算目标的有效姿势,它会自动重置到其初始位置并重试序列。
该资源包括完整的 C++ 源代码和详细文档 (doc) 涵盖机械臂的所有核心功能。
要快速了解正在运行的系统,可以观看机械臂操作的演示在以下 YouTube 视频中看到。
评论(0)