Features:
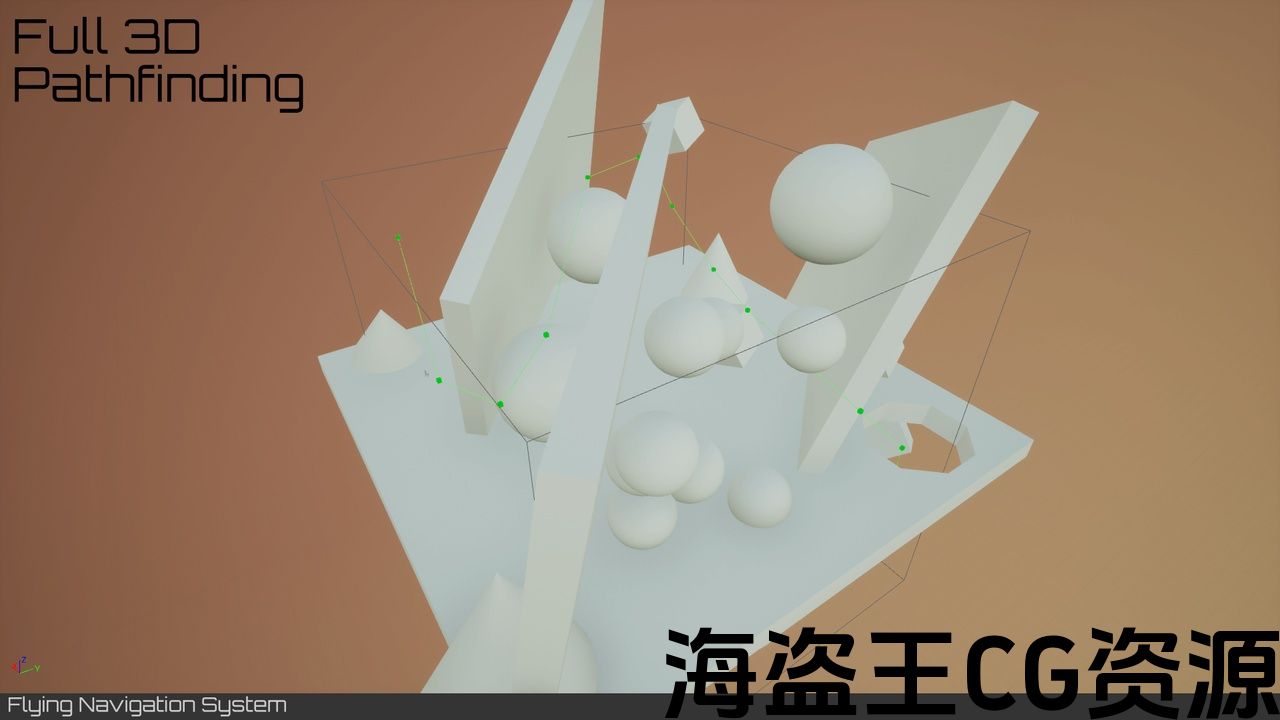
- Full 3D Pathfinding capability for flying AI using an octree structure
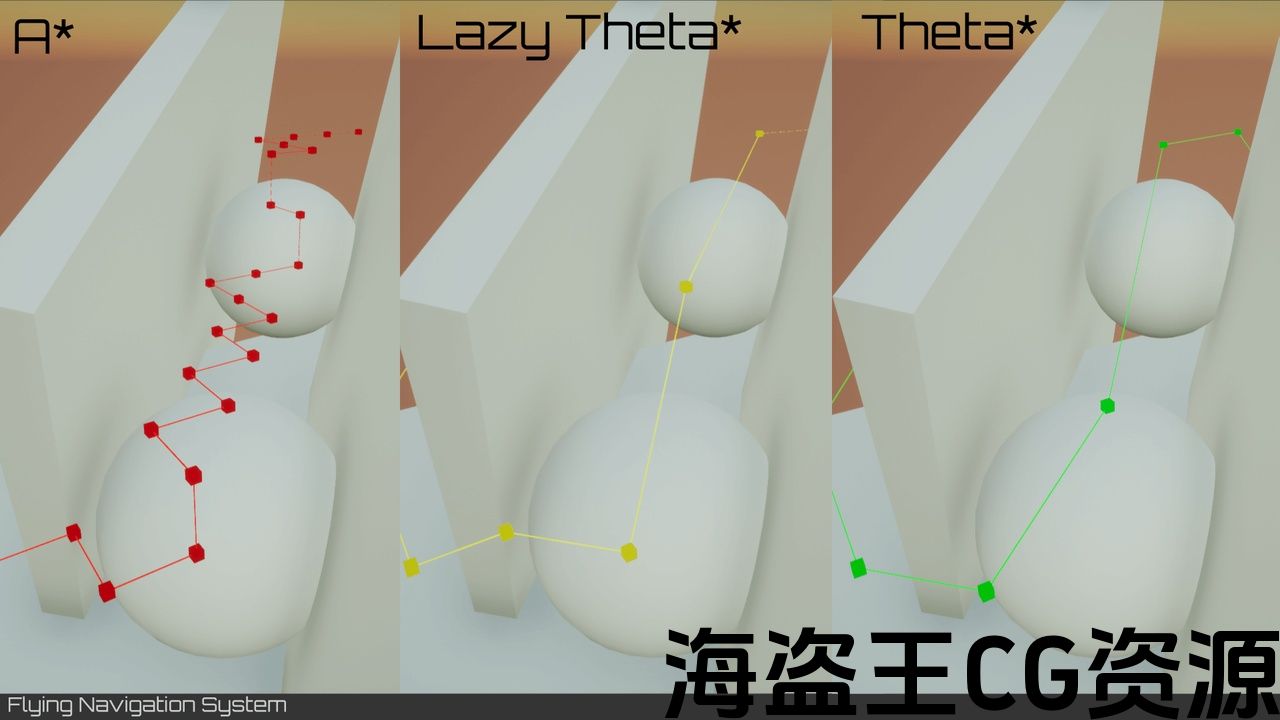
- 3 Pathfinding algorithms (A*, Lazy Theta* and Theta*) with various optimisation options
- Multithreaded octree generation (up to 8 threads)
- Compatible with Behaviour Trees and the MoveToLocation blueprint node
- Allows for agents with a large radius
- Compact memory format
- Supports procedural levels
- Accessible Blueprint and C++ API for runtime building and custom querying
- Fast debug drawing
- Fast testing of accessible paths (precomputed connectivity)
- Fast raycasting against octree structure
Code Modules:
- FlyingNavSystem (Runtime)
Number of Blueprints: N/A
Number of C++ Classes: 14
Network Replicated: Yes
Supported Development Platforms: Windows, macOS, Linux
Supported Target Build Platforms: Windows, macOS, Linux
Documentation: Link
Example Project: GitHub Link
Important/Additional Notes:
Before buying, please see here for the current limitations of this plugin.
特征:
- 使用八叉树结构飞行AI的全三维寻路能力
- 具有各种优化选项的3种寻路算法(A*、Lazy Theta*和Theta*)
- 多线程八叉树生成(最多8个线程)
- 兼容行为树和MoveToLocation蓝图节点
- 允许具有较大半径的代理
- 紧凑型内存格式
- 支持程序级别
- 用于运行时构建和自定义查询的可访问蓝图和C++API
- 快速调试绘图
- 快速测试可访问路径(预计算连接)
- 针对八叉树结构的快速射线投射
代码模块:
- 飞行系统(运行时)
蓝图数目:N/A
C++类数:14
网络复制:是
支持的开发平台:Windows、macOS、Linux
支持的目标构建平台:Windows、macOS、Linux
文件: 连结
示例项目: GitHub链接
重要/附加注意事项:
购买前,请参阅 这里 对于这个插件的当前限制。


SHORT DEMO VIDEO | DOCUMENTATION | DISCORD SERVER | ROADMAP
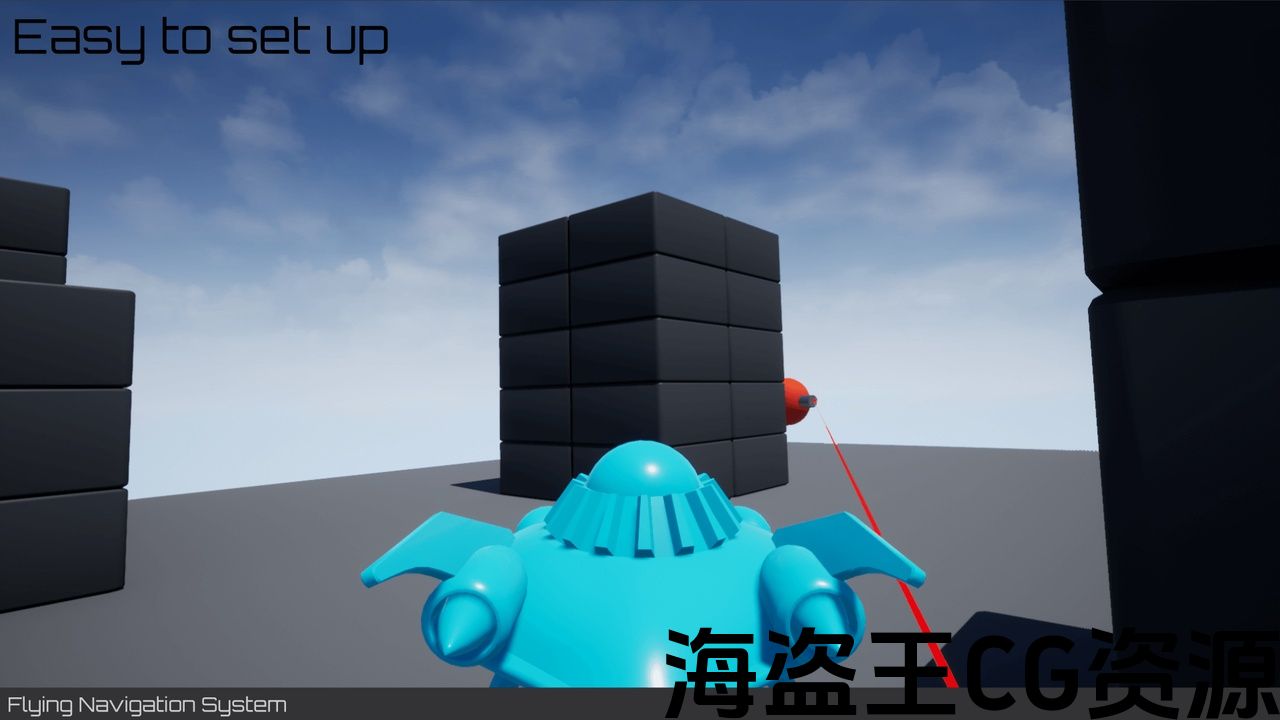
A feature-complete and easy to use Navigation System for flying AI agents. With full 3D pathfinding capability, this plugin is perfect for building advanced flying AI that can intelligently navigate under bridges, around cities and through epic space battles. This plugin is capable of pathfinding in large worlds, as processing time is concentrated in detailed areas. With multithreaded building and asynchronous pathfinding support, your flying AI needn’t break the frame budget. The deep integration into the existing navigation system will get you up and running in no time.
The Flying Navigation System does not interfere with the default NavWalking navigation system, which can be used at the same time.
Update Log:
1.0.20:
Re-added 4.27 support.
Fixed a sync issue with BuildPaths.
Fixed a crash due to multithreading.
Exposed ProjectPointExtent to blueprints.
1.0.19:
Fixed issue with compiling on Android.
Fix for async pathfinding.
1.0.18:
UE 5.4 Support.
Added option to process pathfinding queries across multiple frames.
1.0.17:
UE 5.3 Support.
Fixed bug with serialization on PS5.
Made FlyingNavigationData constructor public to allow for subclassing.
Fixed crash on empty collision data.
Added NAVIGNORE as a static mesh component tag to selectively ignore meshes.
1.0.16:
UE 5.2 Support
Fixed endpoint not using target location when traversing between nodes.
1.0.15:
Added option to expand the range of free voxel search on path endpoints.
1.0.14:
Fixed issue with hang on invalid path query, and sync issue with overridden node locations.
1.0.13:
UE 5.1 Support.
Fixed EndPlay hang bug when aborting async queries.
Fixed sync issues with FSVOGenerator::Cancel() and FSVOGenerator::CollateRasterData().
Added option to limit the number of pathfinding iterations.
1.0.12:
Added Smooth Path option to Pathfinding Query Settings. Alternative to Smooth Path node.
Merged UE5 version features into UE4 compatible plugin version.
1.0.11:
Fixed issue with dedicated Linux Server
Included more detailed debug messages
1.0.10:
UE5 Support. Uses double precision floats for LWC compatibility.
1.0.9 (Requires 4.26+):
More robust geometry gathering on multiple threads
Fixed lazy geometry gathering on landscapes
Exclusive bounds volumes support
1.0.8:
Catmull-Rom Spline Path Smoothing using the Smooth Path node.
Extra PathfindingResult options for debugging
Fix crash related to garbage collection
1.0.7:
UE5 support (just change the uplugin version) (NOTE: very experimental, has issues with World Partition)
Better debug paths drawing (doesn’t clear user debug drawing)
Fixed crash caused by the Lazy Theta* pathfinding algorithm
1.0.6:
Added SetNavigationPathNodes BP node to allow path post-processing in blueprints
Async functions now always finish, even if passed invalid data. The result can be checked with the GetPathfindingResult node.
1.0.5:
Extended CPU Multithreading to support >8 threads
1.0.4:
Moved AllowPartialPaths checkbox to QuerySettings
Added GetPathfindingResult node for more info on fail states
1.0.3:
Added AllowPartialPaths checkbox to blueprint nodes
Fixed crash caused by empty path
1.0.2:
Fixed crash related to the Environment Query System
1.0.1:
Updated Logo
Added more debug log warnings
Added support for World Origin Rebasing
1.0:
Initial Release
一个功能完整和易于使用的导航系统飞行人工智能代理. 凭借完整的3D寻路能力,这个插件非常适合构建先进的飞行AI,可以智能地在桥梁下,城市周围和史诗般的太空战斗中导航。 该插件能够在大型世界中进行寻路,因为处理时间集中在详细区域。 借助多线程构建和异步寻路支持,您的飞行AI无需超出帧预算。 与现有导航系统的深度集成将使您立即启动并运行。
飞行导航系统不会干扰默认的NavWalking导航系统,可以在同一时间使用。
更新日志:
1.0.20:
重新添加4.27支持。
修正了BuildPaths的同步问题。
修复了由于多线程而导致的崩溃。
将ProjectPointExtent暴露给蓝图。
1.0.19:
修正了在Android上编译的问题。
修复异步寻路。
1.0.18:
UE5.4支持。
添加了跨多个帧处理寻路查询的选项。
1.0.17:
UE5.3支持。
修正了ps5上序列化的错误。
使FlyingNavigationData构造函数公开以允许子类化。
修正空碰撞数据的崩溃.
添加NAVIGNORE作为静态网格体组件标记,以选择性地忽略网格体。
1.0.16:
UE5.2支持
固定端点在节点之间遍历时不使用目标位置。
1.0.15:
增加了扩展路径端点上自由体素搜索范围的选项。
1.0.14:
修复了在无效路径查询上挂起的问题,以及与被复盖的节点位置同步的问题。
1.0.13:
UE5.1支持。
修正中止异步查询时EndPlay挂起错误。
修复了fsvogenerator::Cancel()和FSVOGenerator::CollateRasterData()的同步问题。
增加了限制寻路迭代次数的选项。
1.0.12:
为寻路查询设置添加了平滑路径选项。 平滑路径节点的替代。
将UE5版本功能合并到UE4兼容插件版本中。
1.0.11:
修复了专用Linux服务器的问题
包含更详细的调试消息
1.0.10:
UE5支持。 使用双精度浮点数以实现LWC兼容性。
1.0.9(需要4.26+):
在多个线程上收集更健壮的几何体
固定在景观上的懒惰几何聚集
独占边界卷支持
1.0.8:
Catmull-Rom使用平滑路径节点进行样条路径平滑。
用于调试的额外PathfindingResult选项
修复与垃圾回收相关的崩溃
1.0.7:
UE5支持(只需更改uplugin版本)(注意:非常实验性,有世界分区问题)
更好的调试路径绘图(不清除用户调试绘图)
修正了懒惰的Theta*寻路算法导致的崩溃
1.0.6:
添加了SetNavigationPathNodes BP节点以允许蓝图中的路径后处理
异步函数现在总是完成,即使传递了无效的数据. 可以使用GetPathfindingResult节点检查结果。
1.0.5:
扩展CPU多线程以支持>8个线程
1.0.4:
将AllowPartialPaths复选框移动到QuerySettings
添加GetPathfindingResult节点以获取有关失败状态的更多信息
1.0.3:
为蓝图节点添加了AllowPartialPaths复选框
修复了空路径导致的崩溃
1.0.2:
修复了与环境查询系统相关的崩溃
1.0.1:
更新的标志
添加了更多调试日志警告
增加了对世界起源重新调整的支持
1.0:
初始版本
评论(0)